목차
2022-02-18
2D 영상 내에서 특정 물체까지의 3D 거리정보를 얻는 방법은 여러가지가 있었는데
나는 그중 3D 변환을 이용한 방법을 사용하였다.
<이론>
3D 변환을 이용한 방법은 가장 일반적인 방법이며, 영상 기하학에서 좌표계에 대한 이해만 있으면
어렵지 않게 적용할 수 있다.
이 방법을 사용하기 위해서는 카메라의 내부 파라미터(fx, fy, cx, cy)와 카메라 3D 자세정보(R, t)가 미리 구해져 있어야만 사용 가능하다.
카메라의 내부 파라미터(fx, fy, cx, cy) 및 3D 자세정보(R,t)는 앞선 글에서 구하였다.
카메라 내부 파라미터(fx, fy, cx, cy) - <참조: https://dohyeon.tistory.com/23 >
[영상처리] 카메라 캘리브레이션 (Camera Calibration)
2022-02-18 실험실에서 진행하는 프로젝트에서 2D 이미지 내에서 카메라와 물체까지의 3차원 거리를 구하는 task가 주어졌다. 기하학적 계산에 앞서 2차원 이미지의 3차원 변환을 위해서는 camera의 내
dohyeon.tistory.com
카메라 3D 자세정보(R, t) - <참조: https://dohyeon.tistory.com/25?category=1056956 >
[영상처리] 카메라의 위치 및 3D 자세정보
2차원 영상 내에서 3차원 거리정보를 얻기 위해서는 카메라 내부 파라미터 뿐만 아니라 카메라의 위치 및 3D 자세정보가 필요하다. 지난 글에서 카메라 내부 파라미터를 구했으니 https://dohyeon.tist
dohyeon.tistory.com
구해진 내부 파라미터와 3D 자세정보를 이용하여 2D 영상 내 특정 픽셀의 3D 거리정보를 구하는 방법을 알아보자.
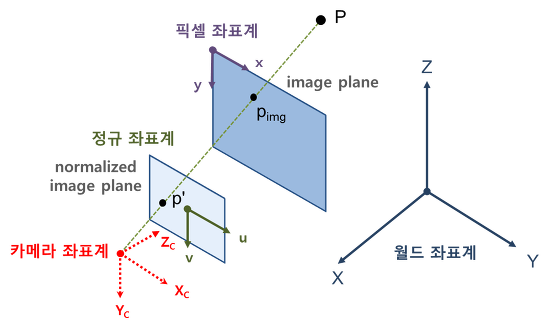
어떤 3차원 공간상의 한 점 P에 대한 카메라좌표를 Pc, 월드좌표를 Pw라 하면 Pc와 Pw 사이의 변환은 다음 수식에 의해 진행된다.

입력 영상의 픽셀좌표를 p(x,y), 대응되는 지면좌표를 P(X, Y)라 하자.
먼저 카메라의 내부파라미터에 대한 영향을 없애기 위해 픽셀좌표를 정규좌표로 변환한다 (영상에서 모든 기하학적 해석은 정규좌표를 통해 이루어진다).

이 때, 구한 정규좌표를 3차원 카메라좌표로 해석하면 (u, v, 1)이 된다. 정규이미지평면은 카메라 원점에서 초점거리가 1인 평면이므로 정규이미지 평면 상의 점 (u, v)의 카메라좌표계 좌표는 (u, v, 1)이 된다. 이 점을 Pc = (u, v, 1)라 하자.
이제 카메라 원점과 Pc를 연결한 직선이 지면과 만나는 점을 구하면 최종 목표를 이루는 것이다.
지면과의 교점을 구하기 위해서는 카메라좌표계가 아닌 월드좌표계에서 계산을 수행해야하는데,
카메라 원점의 카메라좌표를 Cc, 월드좌표를 Cw라 하고 점 Pc의 월드좌표를 Pw라 하자.
<카메라 원점의 카메라좌표는 항상 (0,0,0)임에 주의, 즉 Cc=(0,0,0)>
대응되는 월드좌표는 식 (1)를 이용하여 다음과 같이 계산된다.

이제 월드 좌표계 상에서 Cw와 Pw를 잇는 직선이 지면과 만나는 점을 구해보자. 벡터의 개념을 이용하면 Cw와 Pw를 잇는 직선상의 임의의 점 P = Cw + k(Pw - Cw) 로 표현할 수 있다. (K는 임의의 상수)

그런데, 월드좌표계 상에서 지면은 Z =0 이므로 Cw + k(Pw - Cw)의 Z좌표가 0이 되도록 k의 값을 구하면
월드 좌표계에서 지면과 만나는 점 P를 구할 수 있다!!!
<여기서 구한 지면좌표는 월드좌표계를 어떻게 설정하느냐에 따라 달라지는 값임에 주의>
<적용>
나의 경우 ZED2i camera를 이용해 테스트하였다.(2개의 렌즈를 가진 streo camera지만 한쪽 렌즈에서 촬영한 2D 이미지 정보만 이용하였다.)
앞서 구한 카메라 파라미터 및 3D 자세정보
Fx = 1065.352
Fy = 1064.480
Cx = 960.127
Cy = 569.483
R =
[[ 0.99833387, 0.05028667, -0.02829721],
[ 0.0462584 , -0.99063762, -0.12844172],
[-0.03449118, 0.12691873, -0.99131327]]t = (0.29921233, -1.35458807, 56.65101544)

입력영상의 픽셀좌표 x ,y =(966,544)
픽셀좌료의 정규좌표 u = (x - Cx)/Fx = 0.005512731942
v = (y - Cy)/Fy = -0.02393938825
정규이미지 평면상의 점의 카메라좌표 Pc = (0.005512731942, -0.02393938825, 1)^T
카메라 원점의 카메라좌표 Cc = (0,0,0)^T
점 Pc 의 월드좌표 Pw = R^T(Pc - t)
= [[ 1.68781261]
[-8.39611602]
[55.00499017]]
아래 코드 참조
import numpy as np
Rt = np.array([[ 0.99833387, 0.05028667, -0.02829721],
[ 0.0462584 , -0.99063762, -0.12844172],
[-0.03449118, 0.12691873, -0.99131327]]).T
Pc = np.array([[0.005512731942, -0.02393938825, 1]]).T
t = np.array([[0.29921233, -1.35458807, 56.65101544]]).T
a = Rt
b = (Pc - t)
# a행렬 b행렬 행렬곱
print(np.dot(a,b))
Cw = R^T(Cc - t) = -(R^T)t =
[[ 1.71790764]
[-8.54702723]
[55.99338462]]
아래코드 참조
import numpy as np
Rt = np.array([[ 0.99833387, 0.05028667, -0.02829721],
[ 0.0462584 , -0.99063762, -0.12844172],
[-0.03449118, 0.12691873, -0.99131327]]).T
Pc = np.array([[0.005512731942, -0.02393938825, 1]]).T
t = np.array([[0.29921233, -1.35458807, 56.65101544]]).T
a = Rt
b = (Pc - t)
#print(np.dot(a,b))
c = (-t)
print(np.dot(a,c))
마지막으로 내가 최종적으로 구하려는 지면과의 교점

위 공식에서 임의의 상수 k는 점 P의 z좌표가 0이라는 사실을 이용하여 구할 수 있다.
(Cw의 z 좌표) + k(Pw의 z좌표- Cw의 z 좌표) = 0
을 이용하면 결과적으로
k = 56.65084883 을 얻을 수 있다.
따라서
점 P = Cw + k(Pw-Cw) 이므로
최종코드
import numpy as np
Rt = np.array([[ 0.99833387, 0.05028667, -0.02829721],
[ 0.0462584 , -0.99063762, -0.12844172],
[-0.03449118, 0.12691873, -0.99131327]]).T
Pc = np.array([[0.005512731942, -0.02393938825, 1]]).T
t = np.array([[0.29921233, -1.35458807, 56.65101544]]).T
a = Rt
b = (Pc - t)
c = (-t)
Pw = np.dot(a,b)
Cw = np.dot(a,c)
k = 56.65084883
# print(Pw)
# print(Cw)
P = Cw + k*(Pw-Cw)
print(P)위 코드로 지면과의 교점 P의 3차원 좌표를 구할 수 있다.
'카메라 > 기하학' 카테고리의 다른 글
| [Depth camera] 이론 (0) | 2022.04.25 |
|---|---|
| 카메라의 위치 및 3D 자세정보 (2) | 2022.02.18 |
| 카메라 캘리브레이션 (Camera Calibration) (2) | 2022.02.18 |
| 카메라 왜곡보정 - Camera Models (0) | 2021.06.27 |