목차
2차원 영상 내에서 3차원 거리정보를 얻기 위해서는
카메라 내부 파라미터 뿐만 아니라 카메라의 위치 및 3D 자세정보가 필요하다.
지난 글에서 카메라 내부 파라미터를 구했으니
https://dohyeon.tistory.com/23
[영상처리] 카메라 캘리브레이션 (Camera Calibration)
2022-02-18 실험실에서 진행하는 프로젝트에서 2D 이미지 내에서 카메라와 물체까지의 3차원 거리를 구하는 task가 주어졌다. 기하학적 계산에 앞서 2차원 이미지의 3차원 변환을 위해서는 camera의 내
dohyeon.tistory.com
이번 글에서 카메라의 위치 및 3D 자세정보를 구해보겠다.
카메라로 촬영한 영상을 보고 이 영상을 획득할 당시의 카메라의 위치 및 3D 자세정보(팬,틸트)를 추출하기 위해서는
먼저 다음과 같은 전제조건이 필요하다.
a. 해당 카메라의 내부 파라미터 및 왜곡계수 : fx, fy, cx, cy, k1, k2, p1, p2
b. 물체에 대한 최소 4개 이상의 3D 월드좌표+ 이에 대응되는 2D 영상좌표
a. 는 이전 글에서 구했으니 넘어가고,
b. 를 각각 구해줘야 하는데 말로만 하면 이해가 가지 않으니 그림으로 예를 들겠다.
1. 물체의 3D 월드좌표 + 이에 대응되는 2D 영상좌표 구하기
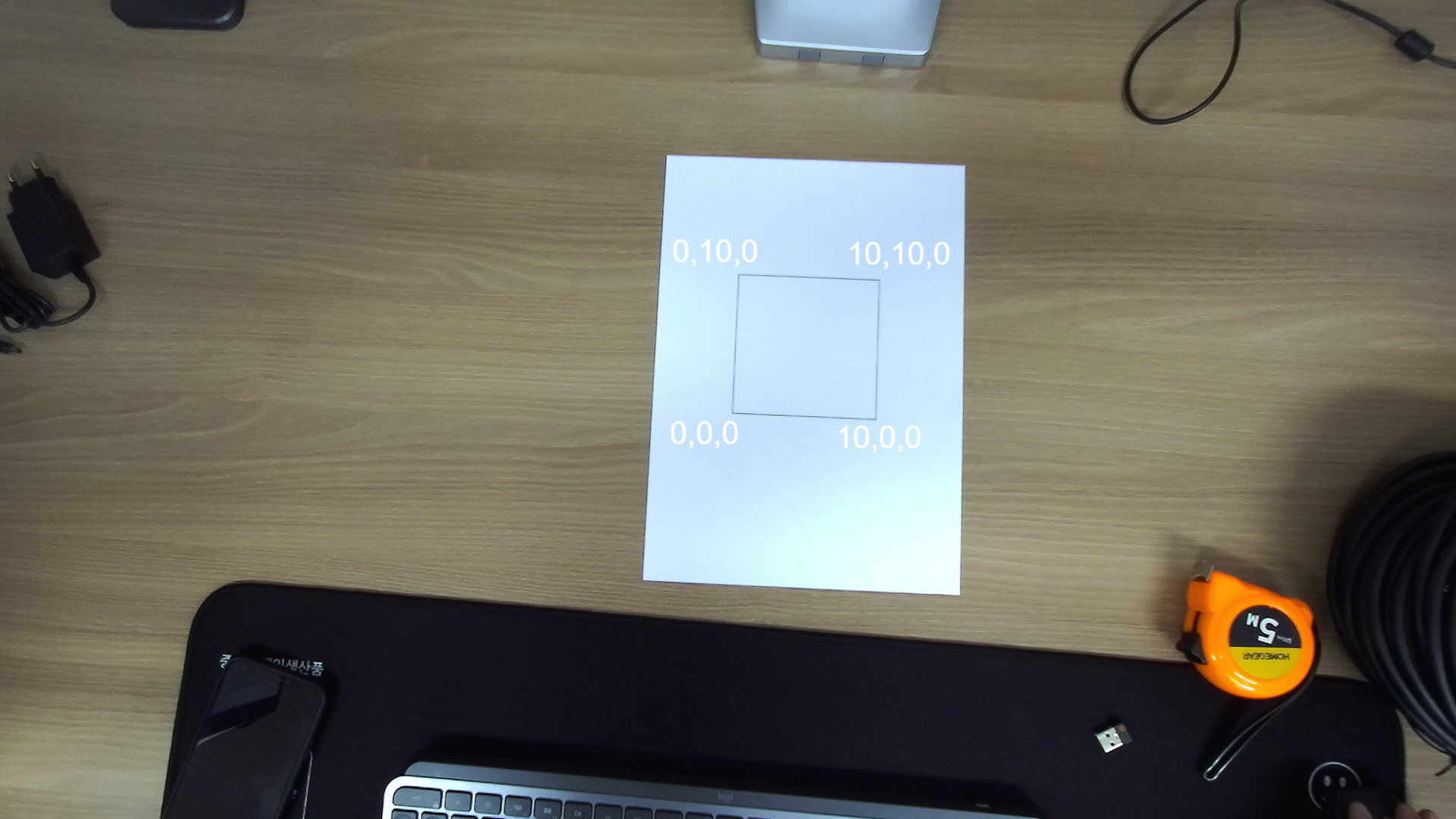
A4 용지에 10cm x 10cm 크기의 정사각형을 그리고 프린트하였다.
위 그림과 같이 각각의 사각형 꼭지점들에 대한 3D 월드좌표를 임의로 정의해준 뒤, 해당점에 매칭되는 사각형 꼭지점들의 2D 영상좌표쌍을 구해준다. 구해준 네쌍의 점의 좌표를 solvePnP 함수에 인자로 넣어주면 카메라의 위치 및 자세정보가 나온다.
위 그림에서는
사각형의 3D 월드좌표 = (0,0,0), (10,0,0), (0,10,0), (10,10,0)
사각형의 2D 영상좌표 = ?
사각형의 2D 영상좌표는 어떻게 구할 수 있을까?
openCV 마우스클릭 이벤트를 이용하면 구할 수 있다.
import cv2
import numpy as np
# 마우스 이벤트 콜백함수 정의
def mouse_callback(event, x, y, flags, param):
print("마우스 이벤트 발생, x:", x ," y:", y) # 마우스 위치 출력
img = cv2.imread("이미지 절대경로")
cv2.namedWindow('image') #마우스 이벤트 영역 윈도우 생성
cv2.setMouseCallback('image', mouse_callback)
while(True):
cv2.imshow('image', img)
k = cv.waitKey(1) & 0xFF
if k == 27: # ESC 키 눌러졌을 경우 종료
print("ESC 키 눌러짐")
break
cv2.destroyAllWindows()위 코드를 이용하면
사각형의 2D 영상좌표 = (236,420), (423,428), (244,239), (428,246)
를 구할 수 있다.
결과적으로
사각형의 2D 영상좌표 = (236,420), (423,428), (244,239), (428,246)
사각형의 3D 월드좌표 = (0,0,0), (10,0,0), (0,10,0), (10,10,0)
를 구하였다.
따라서 사각형 네 꼭지점의
2차원 영상좌표와 3차원 월드좌표를 코드로 나타내면 아래와 같다.
#2차원 영상좌표
points_2D = np.array([
(966, 543), #좌 하단
(1155, 554), #우 하단
(975, 363), #좌 상단
(1159, 369), #우 상단
], dtype="double")
#3차원 월드좌표
points_3D = np.array([
(0.0, 0.0, 0.0), #좌 하단
(10, 0.0, 0.0), #우 하단
(0.0, 10, 0.0), #좌 상단
(10, 10, 0.0) #우 상단
], dtype="double")
solvePnP 함수의 인자를 살펴보면
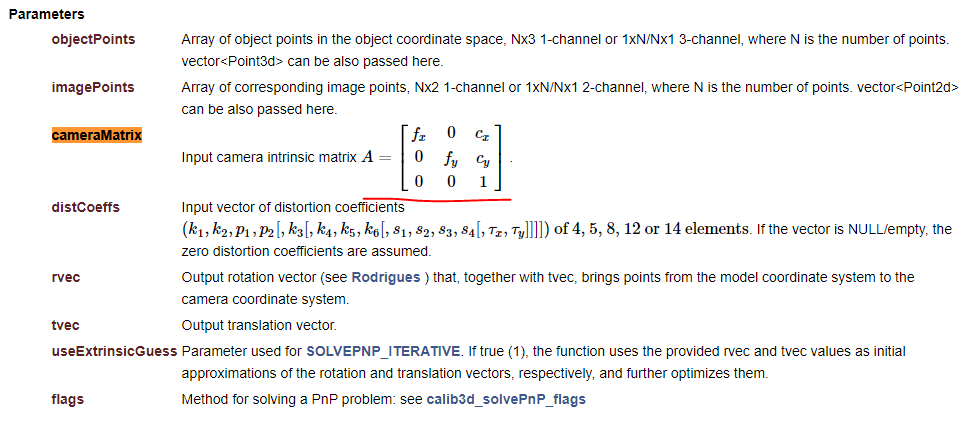
2. cameraMatrix 인자 정의하기
cameraMatrix (카메라 내부 파라미터) 는 행렬 형태로 나타내줘야 하기 때문에
numpy 라이브러리를 이용하면 다음과 같다.
# camera 내부 파라미터
cameraMatrix = np.array([[1065.352, 0, 960.127], [0, 1064.480, 569.483], [0, 0, 1]])3. distCoeffs 인자 정의하기
distCoeffs 인자는 왜곡을 무시하고 진행할것이기 때문에 Null 값을 넣어주면 된다.
#distcoeffs는 카메라의 왜곡을 무시하기 때문에 null값 전달
dist_coeffs = np.zeros((4,1))
4. <최종 코드>
import cv2
import numpy as np
img = cv2.imread("C:/Users/MSDL-DESK-02/Desktop/img.png")
size = img.shape
#2차원 영상좌표
points_2D = np.array([
(966, 543), #좌 하단
(1155, 554), #우 하단
(975, 363), #좌 상단
(1159, 369), #우 상단
], dtype="double")
#3차원 월드좌표
points_3D = np.array([
(0.0, 0.0, 0.0), #좌 하단
(10, 0.0, 0.0), #우 하단
(0.0, 10, 0.0), #좌 상단
(10, 10, 0.0) #우 상단
], dtype="double")
# camera 내부 파라미터
cameraMatrix = np.array([[1065.352, 0, 960.127], [0, 1064.480, 569.483], [0, 0, 1]])
#distcoeffs는 카메라의 왜곡을 무시하기 때문에 null값 전달
dist_coeffs = np.zeros((4,1))
#solvePnp 함수적용
retval, rvec, tvec = cv2.solvePnP(points_3D, points_2D, cameraMatrix, dist_coeffs, rvec=None, tvec=None, useExtrinsicGuess=None, flags=None)
R = cv2.Rodrigues(rvec)
t= tvec
print(R)
print("\n")
print(tsolvePnp 함수는 기본적으로 3D 월드좌표를 3D 카메라 좌표로 변환시키는 변환정보 (retval, rvec, tvec)를 반환하며 이로부터 회전변환 R과 평행이동 T를 아래와 같이 얻을 수 있다.
rvec = 회전 벡터
tvec = 평행이동 벡터
R = cv2.Rodrigues(rvec)
T = tvec
openCV의 solvePnP 함수가 반환하는 rvec은 회전변환에 대한 Rodrigues 표현이기 때문에
실제 회전변환 행렬 R을 구하기 위해서는 openCV의 Rodrigues() 함수를 취해주어야 한다.
결과적으로
R = (array([[ 0.99833387, 0.05028667, -0.02829721],
[ 0.0462584 , -0.99063762, -0.12844172],
[-0.03449118, 0.12691873, -0.99131327]])
t = [[ 0.29921233]
[-1.35458807]
[56.65101544]]
'카메라 > 기하학' 카테고리의 다른 글
| [Depth camera] 이론 (0) | 2022.04.25 |
|---|---|
| 2D 영상에서 물체까지 3D 거리 구하기 (5) | 2022.02.19 |
| 카메라 캘리브레이션 (Camera Calibration) (2) | 2022.02.18 |
| 카메라 왜곡보정 - Camera Models (0) | 2021.06.27 |