목차
2022-02-03 작성
이번에 연구실에서 depth camera를 이용해서 object를 segmentation 하고 distance를 계산하는 task가 주어졌다.
이를 위해 zed2i 카메라를 이용하기로 하였고 기본적인 환경세팅 방법을 정리해보려 한다.
작성기준
os: ubuntu 18.04
1. ZED SDK 설치
https://www.stereolabs.com/developers/release/
ZED SDK 3.6 - Download
ZED SDK 3.6 introduces a new custom bounding box detector input for the 3D Object detection, a major improvement in the Body Tracking, and the support of CUDA 11.X and Jetpack 4.6
www.stereolabs.com
위 사이트에 들어가서 자신의 CUDA 버전에 맞는 최신버전 ZED SDK 설치한다.
나는 cuda 10.2 버전 ZED SDK 3.6을 설치한다.
(ZED SDK는 cuda가 미리 설치되어 있지 않으면 제대로 설치되지 않으니 주의!!!)
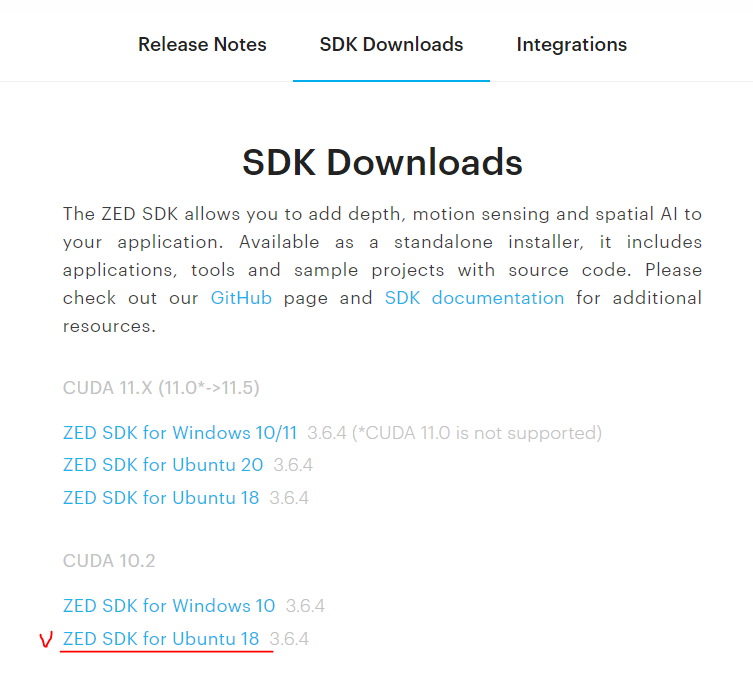
설치된 ZED_SDK_Ubuntu18_cuda10.2_v3.6.4.run file을
sudo chmod a+x ZED_SDK_Ubuntu18_cuda10.2_v3.6.4.run위 명령어로 실행권한을 부여해준 뒤
./ZED_SDK_Ubuntu18_cuda10.2_v3.6.4.run위 명령어로 설치를 진행한다.
(나오는 물음에는 다 Y를 입력하면 된다.)
성공적으로 설치가 되면
/usr/local/ 폴더 내에 zed 라는 폴더가 생성된다.
2. python API 설치
https://github.com/stereolabs/zed-python-api/tree/8b527636a1671624ed955ccd7813cddaa39fedd9
GitHub - stereolabs/zed-python-api: Python API for the ZED SDK
Python API for the ZED SDK. Contribute to stereolabs/zed-python-api development by creating an account on GitHub.
github.com
위 사이트에 들어가서 설치 메뉴얼에 따르면 설치가 가능하다.
- anaconda를 이용해 python=3.7 에 맞춰 가상환경을 하나 build 해준다.
conda create -n zed python=3.7 - Prerequisites에 맞춰 위 라이브러리들을 설치해준다.
(주의 !! python version 3이상부터는 python3 pip install을 해줘야 한다.
python3 -m pip install opencv-python pyopengl python3 -m pip install cython numpy - 이어서 /usr/local/zed 폴더에 들어가서 get_python_api.py 파일을 실행하여 api를 설치한다.
cd /usr/local/zed/
python get_python_api.py
3. python api 설치확인
python 스크립트 들어간 뒤
import pyzed.sl as sl위 라이브러리를 임포트 해보고 문제없으면 잘 설치된것이다.
'머신비전 > 카메라 테스트' 카테고리의 다른 글
| [Depth camera] - Stereolabs ZED2i(Neural Depth mode 세팅방법) (0) | 2022.08.23 |
|---|---|
| [Depth camera] - Intel realsense D435 (0) | 2021.07.09 |